Difference between path and movement. Mechanical movement
Lesson objectives:
- Educational:
– introduce the concepts of “movement”, “path”, “trajectory”. - Developmental:
- develop logical thinking, correct physical speech, use appropriate terminology. - Educational:
– achieve high class activity, attention, and concentration of students.
Equipment:
- plastic bottle with a capacity of 0.33 liters with water and a scale;
- medical bottle with a capacity of 10 ml (or small test tube) with a scale.
Demonstrations: Determining displacement and distance traveled.
During the classes
1. Updating knowledge.
- Hello guys! Sit down! Today we will continue to study the topic “Laws of interaction and motion of bodies” and in the lesson we will get acquainted with three new concepts (terms) related to this topic. In the meantime, let's check your homework for this lesson.
2. Checking homework.
Before class, one student writes the solution to the following homework assignment on the board:
Two students are given cards with individual tasks that are completed during the oral test ex. 1 page 9 of the textbook.
1. Which coordinate system (one-dimensional, two-dimensional, three-dimensional) should be chosen to determine the position of bodies:
a) tractor in the field;
b) helicopter in the sky;
c) train
d) chess piece on the board.
2. Given the expression: S = υ 0 t + (a t 2) / 2, express: a, υ 0
1. Which coordinate system (one-dimensional, two-dimensional, three-dimensional) should be chosen to determine the position of such bodies:
a) chandelier in the room;
b) elevator;
V) Submarine;
d) plane on the runway.
2. Given the expression: S = (υ 2 – υ 0 2) / 2 · a, express: υ 2, υ 0 2.
3. Study of new theoretical material.
Associated with changes in the coordinates of the body is the quantity introduced to describe the movement - MOVEMENT.
The displacement of a body (material point) is a vector connecting the initial position of the body with its subsequent position.
Movement is usually denoted by the letter . In SI, displacement is measured in meters (m).
– [m] – meter.
Displacement - magnitude vector, those. In addition to the numerical value, it also has a direction. The vector quantity is represented as segment, which begins at a certain point and ends with a point indicating the direction. Such an arrow segment is called vector.
 – vector drawn from point M to M 1
– vector drawn from point M to M 1 Knowing the displacement vector means knowing its direction and magnitude. The modulus of a vector is a scalar, i.e. numerical value. Knowing the initial position and the vector of movement of the body, you can determine where the body is located.
While moving material point occupies different positions in space relative to the chosen reference system. In this case, the moving point “describes” some line in space. Sometimes this line is visible - for example, a high-flying plane can leave a trail in the sky. A more familiar example is the mark of a piece of chalk on a blackboard.
An imaginary line in space along which a body moves is called TRAJECTORY body movements.
The trajectory of a body is a continuous line that is described by a moving body (considered as a material point) in relation to the selected reference system.

The movement in which all points body moving along the same trajectories, called progressive.
Very often the trajectory is an invisible line. Trajectory moving point can be straight or crooked line. According to the shape of the trajectory movement It happens straightforward And curvilinear.


The path length is PATH. The path is a scalar quantity and is denoted by the letter l. The path increases if the body moves. And remains unchanged if the body is at rest. Thus, the path cannot decrease over time.
The displacement module and the path can coincide in value only if the body moves along a straight line in the same direction.
What is the difference between a path and a movement? These two concepts are often confused, although in fact they are very different from each other. Let's look at these differences: ( Appendix 3) (distributed in the form of cards to each student)
- The path is a scalar quantity and is characterized only by a numerical value.
- Displacement is a vector quantity and is characterized by both a numerical value (module) and direction.
- When a body moves, the path can only increase, and the displacement module can both increase and decrease.
- If the body returns to the starting point, its displacement is zero, but the path is not zero.
| Path | Moving | |
| Definition | The length of the trajectory described by a body in a certain time | A vector connecting the initial position of the body with its subsequent position |
| Designation | l [m] | S [m] |
| Nature of physical quantities | Scalar, i.e. determined only by numeric value | Vector, i.e. determined by numerical value (modulus) and direction |
| The need for introduction | Knowing the initial position of the body and the path l traveled during the time interval t, it is impossible to determine the position of the body in this moment time t | Knowing the initial position of the body and S for a period of time t, the position of the body at a given moment of time t is uniquely determined |
| l = S in the case of rectilinear motion without returns | ||
4. Demonstration of experience (students perform independently in their places at their desks, the teacher, together with the students, performs a demonstration of this experience)
- Fill with water up to the neck plastic bottle with scale.
- Fill the bottle with the scale with water to 1/5 of its volume.
- Tilt the bottle so that the water comes up to the neck, but does not flow out of the bottle.
- Quickly lower the bottle of water into the bottle (without closing it with the stopper) so that the neck of the bottle enters the water of the bottle. The bottle floats on the surface of the water in the bottle. Some of the water will spill out of the bottle.
- Screw the bottle cap on.
- Squeeze the sides of the bottle and lower the float to the bottom of the bottle.

- By releasing the pressure on the walls of the bottle, make the float float to the surface. Determine the path and movement of the float:__________________________________________________________
- Lower the float to the bottom of the bottle. Determine the path and movement of the float:________________________________________________________________________________
- Make the float float and sink. What is the path and movement of the float in this case?_______________________________________________________________________________________
5. Exercises and questions for review.
- Do we pay for the journey or transportation when traveling in a taxi? (Path)
- The ball fell from a height of 3 m, bounced off the floor and was caught at a height of 1 m. Find the path and movement of the ball. (Path – 4 m, movement – 2 m.)
6. Lesson summary.
Review of lesson concepts:
– movement;
– trajectory;
- path.
7. Homework.
§ 2 of the textbook, questions after the paragraph, exercise 2 (p. 12) of the textbook, repeat the lesson experience at home.
Bibliography
1. Peryshkin A.V., Gutnik E.M.. Physics. 9th grade: textbook for general educational institutions - 9th ed., stereotype. – M.: Bustard, 2005.
Trajectory- a curve (or line) that a body describes when moving. We can talk about a trajectory only when the body is represented as a material point.
The trajectory of movement can be:
It is worth noting that if, for example, a fox runs randomly in one area, then this trajectory will be considered invisible, since it will not be clear how exactly it moved.
Trajectory of movement in different systems the countdown will be different. You can read about this here.
Path
Path- This physical quantity, which shows the distance traveled by the body along the trajectory of movement. Designated L (in rare cases S).
The path is a relative quantity, and its value depends on the chosen reference system.
This can be verified at simple example: There is a passenger on an airplane who moves from tail to nose. So, its path in the reference frame associated with the aircraft will be equal to the length of this passage L1 (from tail to nose), but in the reference frame associated with the Earth, the path will be equal to the sum of the lengths of the passage of the aircraft (L1) and the path (L2) , which the plane made relative to the Earth. Therefore in in this case the whole path will be expressed like this:
Moving
Moving is a vector that connects the starting position of a moving point with its final position over a certain period of time.
Denoted by S. Unit of measurement is 1 meter.
When moving straight in one direction, it coincides with the trajectory and the distance traveled. In any other case, these values do not coincide.

This is easy to see with a simple example. A girl is standing, and in her hands is a doll. She throws it up, and the doll goes a distance of 2 m and stops for a moment, and then begins to move down. In this case, the path will be equal to 4 m, but the displacement will be 0. The doll in this case covered a path of 4 m, since at first it moved up 2 m, and then down the same amount. In this case, no movement occurred, since the starting and ending points are the same.
The position of a material point is determined in relation to some other, arbitrarily chosen body, called reference body. Contacts him frame of reference– a set of coordinate systems and clocks associated with a reference body.
In the Cartesian coordinate system, the position of point A at a given time relative to this system is characterized by three coordinates x, y and z or a radius vector r – a vector drawn from the origin of the coordinate system to a given point. When a material point moves, its coordinates change over time. r=r(t) or x=x(t), y=y(t), z=z(t) – kinematic equations of a material point.
The main task of mechanics– knowing the state of the system at some initial moment of time t 0 , as well as the laws governing the movement, determine the state of the system at all subsequent moments of time t.
Trajectory movement of a material point - a line described by this point in space. Depending on the shape of the trajectory, there are rectilinear And curvilinear point movement. If the trajectory of a point is a flat curve, i.e. lies entirely in one plane, then the motion of the point is called flat.
The length of the section of the trajectory AB traversed by the material point since the start of time is called path lengthΔs is a scalar function of time: Δs=Δs(t). Unit - meter(m) – the length of the path traveled by light in a vacuum in 1/299792458 s.
IV. Vector method of specifying movement
Radius vector r – a vector drawn from the origin of the coordinate system to a given point. Vector Δ r=r-r 0 , drawn from the initial position of a moving point to its position at a given time is called moving(increment of the radius vector of a point over the considered period of time).
Average speed vector< v> called the increment ratio Δ r radius vector of a point to the time interval Δt: (1). The direction of the average speed coincides with the direction Δ r.With an unlimited decrease in Δt, the average speed tends to a limiting value, which is called instantaneous speedv. Instantaneous speed is the speed of a body at a given moment of time and at a given point of the trajectory: (2). Instantaneous speed v is a vector quantity equal to the first derivative of the radius vector of a moving point with respect to time.
To characterize the speed of change of speed v points in mechanics, a vector physical quantity called acceleration.

Medium acceleration uneven motion in the interval from t to t+Δt is called a vector quantity equal to the ratio of the change in speed Δ v to the time interval Δt:
Instantaneous acceleration a material point at time t will be the limit of average acceleration: (4). Acceleration A is a vector quantity equal to the first derivative of speed with respect to time.
V. Coordinate method of specifying movement
The position of point M can be characterized by the radius vector r or three coordinates x, y and z: M(x,y,z). The radius vector can be represented as the sum of three vectors directed along the coordinate axes: (5).
From the definition of speed ![]() (6). Comparing (5) and (6) we have: (7). Taking into account (7), formula (6) can be written (8). The speed module can be found:(9).
(6). Comparing (5) and (6) we have: (7). Taking into account (7), formula (6) can be written (8). The speed module can be found:(9).
Similarly for the acceleration vector:
![]() (10),
(10),
![]() (11),
(11),
A natural way to define movement (describing movement using trajectory parameters)
The movement is described by the formula s=s(t). Each point of the trajectory is characterized by its value s. The radius vector is a function of s and the trajectory can be given by the equation r=r(s). Then r=r(t) can be represented as a complex function r. Let's differentiate (14). Value Δs – distance between two points along the trajectory, |Δ r| - the distance between them in a straight line. As the points get closer, the difference decreases. , Where τ
– unit vector tangent to the trajectory. , then (13) has the form v=τ
v (15). Therefore, the speed is directed tangentially to the trajectory. 
Acceleration can be directed at any angle to the tangent to the trajectory of motion. From the definition of acceleration ![]() (16). If τ
is tangent to the trajectory, then is a vector perpendicular to this tangent, i.e. directed normally. Unit vector, in the normal direction is denoted n. The value of the vector is 1/R, where R is the radius of curvature of the trajectory.
(16). If τ
is tangent to the trajectory, then is a vector perpendicular to this tangent, i.e. directed normally. Unit vector, in the normal direction is denoted n. The value of the vector is 1/R, where R is the radius of curvature of the trajectory.
A point located at a distance from the path and R in the direction of the normal n, is called the center of curvature of the trajectory. Then (17). Taking into account the above, formula (16) can be written: ![]() (18).
(18).
The total acceleration consists of two mutually perpendicular vectors: directed along the trajectory of motion and called tangential, and acceleration directed perpendicular to the trajectory along the normal, i.e. to the center of curvature of the trajectory and called normal.
We find the absolute value of the total acceleration: ![]() (19).
(19).
Lecture 2 Movement of a material point in a circle. Angular displacement, angular velocity, angular acceleration. Relationship between linear and angular kinematic quantities. Vectors of angular velocity and acceleration.
Lecture outline
Kinematics of rotational motion
In rotational motion, the measure of displacement of the entire body over a short period of time dt is the vector dφ elementary body rotation. Elementary turns
(denoted by or) can be considered as pseudovectors (as if).

Angular movement - a vector quantity whose magnitude is equal to the angle of rotation, and the direction coincides with the direction of translational motion right screw (directed along the axis of rotation so that when viewed from its end, the rotation of the body appears to be occurring counterclockwise). The unit of angular displacement is rad.
The rate of change in angular displacement over time is characterized by angular velocity
ω
. Angular velocity solid– a vector physical quantity that characterizes the rate of change in the angular displacement of a body over time and is equal to the angular displacement performed by the body per unit time: 
Directed vector ω along the axis of rotation in the same direction as dφ (according to the right screw rule). Unit of angular velocity - rad/s
The rate of change in angular velocity over time is characterized by angular acceleration ε
(2).

The vector ε is directed along the axis of rotation in the same direction as dω, i.e. with accelerated rotation, with slow rotation.
The unit of angular acceleration is rad/s 2 .
During dt an arbitrary point of a rigid body A move to dr, having walked the path ds. From the figure it is clear that dr equal to the vector product of the angular displacement dφ to radius – point vector r : dr =[ dφ · r ] (3).
Linear speed of a point is related to the angular velocity and radius of the trajectory by the relation: 
In vector form, the formula for linear speed can be written as vector product: (4)
By definition of the vector product its module is equal to , where is the angle between the vectors and, and the direction coincides with the direction of translational motion of the right propeller as it rotates from to.
Let's differentiate (4) with respect to time:
Considering that - linear acceleration, - angular acceleration, and - linear velocity, we obtain:
The first vector on the right side is directed tangent to the trajectory of the point. It characterizes the change in linear velocity modulus. Therefore, this vector is the tangential acceleration of the point: a τ =[ ε · r ] (7). The tangential acceleration module is equal to a τ = ε · r. The second vector in (6) is directed towards the center of the circle and characterizes the change in the direction of linear velocity. This vector is the normal acceleration of the point: a n =[ ω · v ] (8). Its modulus is equal to a n =ω·v or taking into account that v = ω· r, a n = ω 2 · r = v 2 / r (9).
Special cases of rotational motion
With uniform rotation: , hence .
Uniform rotation can be characterized rotation period T- the time it takes for a point to complete one full revolution,
Rotation frequency - the number of full revolutions made by a body during its uniform motion in a circle, per unit of time: (11)
Speed unit - hertz (Hz).
With uniformly accelerated rotational motion :
Lecture 3 Newton's first law. Force. The principle of independence of acting forces. Resultant force. Weight. Newton's second law. Pulse. Law of conservation of momentum. Newton's third law. Moment of impulse of a material point, moment of force, moment of inertia.
Lecture outline
Newton's first law
Newton's second law
Newton's third law
Moment of impulse of a material point, moment of force, moment of inertia
Newton's first law. Weight. Force
Newton's first law: There are reference systems relative to which bodies move rectilinearly and uniformly or are at rest if no forces act on them or the action of the forces is compensated.
Newton's first law is satisfied only in the inertial frame of reference and asserts the existence of the inertial frame of reference.
Inertia- this is the property of bodies to strive to keep their speed constant.
Inertia call the property of bodies to prevent a change in speed under the influence of an applied force.
Body mass– this is a physical quantity that is a quantitative measure of inertia, it is a scalar additive quantity. Additivity of mass is that the mass of a system of bodies is always equal to the sum of the masses of each body separately. Weight– the basic unit of the SI system.
One form of interaction is mechanical interaction. Mechanical interaction causes deformation of bodies, as well as a change in their speed.
Force– this is a vector quantity that is a measure of the mechanical impact on the body from other bodies, or fields, as a result of which the body acquires acceleration or changes its shape and size (deforms). Force is characterized by its modulus, direction of action, and point of application to the body.
Basic units of measurement of quantities in the SI system are:
- unit of measurement of length - meter (1 m),
- time - second (1 s),
- mass - kilogram (1 kg),
- amount of substance - mole (1 mol),
- temperatures - kelvin (1 K),
- electric current - ampere (1 A),
- For reference: luminous intensity - candela (1 cd, actually not used when solving school problems).
When performing calculations in the SI system, angles are measured in radians.
If a physics problem does not indicate in which units the answer must be given, it must be given in SI units or in quantities derived from them corresponding to the physical quantity that is asked about in the problem. For example, if the problem requires finding speed, and it does not say how it should be expressed, then the answer must be given in m/s.
For convenience, in physics problems it is often necessary to use submultiple (decreasing) and multiple (increasing) prefixes. they can be applied to any physical quantity. For example, mm - millimeter, kt - kiloton, ns - nanosecond, Mg - megagram, mmol - millimole, μA - microampere. Remember that there are no double prefixes in physics. For example, mcg is microgram, not millikilogram. Please note that when adding and subtracting quantities, you can only operate with quantities of the same dimension. For example, kilograms can only be added with kilograms, only millimeters can be subtracted from millimeters, and so on. When converting values, use the following table.
Path and movement
Kinematics is a branch of mechanics in which the movement of bodies is considered without identifying the causes of this movement.
Mechanical movement A body is called a change in its position in space relative to other bodies over time.
Every body has certain dimensions. However, in many mechanics problems there is no need to indicate the positions of individual parts of the body. If the dimensions of a body are small compared to the distances to other bodies, then this body can be considered material point. So, when moving a car over long distances, its length can be neglected, since the length of the car is small compared to the distances it travels.
It is intuitively clear that the characteristics of movement (speed, trajectory, etc.) depend on where we look at it from. Therefore, to describe the motion, the concept of a reference system is introduced. Reference system (FR)– a combination of a reference body (it is considered absolutely solid), a coordinate system attached to it, a ruler (a device that measures distances), a clock and a time synchronizer.
Moving over time from one point to another, a body (material point) describes a certain line in a given CO, which is called body movement trajectory.
By moving the body called a directed straight line segment connecting the initial position of a body with its final position. Displacement is a vector quantity. By moving, the movement can increase, decrease and become equal to zero in the process.
Passed path equal to length trajectory traversed by a body over a period of time. Path is a scalar quantity. The path cannot decrease. The path only increases or remains constant (if the body does not move). When a body moves along a curved path, the module (length) of the displacement vector is always less than the distance traveled.
At uniform(at constant speed) moving path L can be found by the formula:
Where: v– body speed, t- the time during which it moved. When solving problems in kinematics, displacement is usually found from geometric considerations. Often geometric considerations for finding displacement require knowledge of the Pythagorean theorem.
average speed
Speed– a vector quantity characterizing the speed of movement of a body in space. Speed can be medium or instantaneous. Instantaneous speed describes movement at a given specific moment in time at a given specific point in space, and average speed characterizes the entire movement as a whole, in general, without describing the details of movement in each specific area.
Average travel speed is the ratio of the entire path to the entire time of movement:

Where: L full - the entire path that the body has traveled, t full – all the time of movement.
Average moving speed is the ratio of the total movement to the entire movement time:

This quantity is directed in the same way as the complete movement of the body (that is, from the initial point of movement to the end point). However, do not forget that the total displacement is not always equal algebraic sum movements at certain stages of movement. The vector of total displacement is equal to the vector sum of displacements at individual stages of movement.
- When solving kinematics problems, do not make a very common mistake. The average speed, as a rule, is not equal to the arithmetic mean of the body's speeds at each stage of movement. The arithmetic mean is obtained only in some special cases.
- And even more so, the average speed is not equal to one of the speeds with which the body moved during the movement, even if this speed had approximately an intermediate value relative to other speeds with which the body moved.
Uniformly accelerated linear motion
Acceleration– vector physical quantity that determines the rate of change in the speed of a body. The acceleration of a body is the ratio of the change in speed to the period of time during which the change in speed occurred:
![]()
Where: v 0 – initial speed of the body, v– final speed of the body (that is, after a period of time t).
Further, unless otherwise specified in the problem statement, we believe that if a body moves with acceleration, then this acceleration remains constant. This body movement is called uniformly accelerated(or equally variable). With uniformly accelerated motion, the speed of a body changes by the same amount over any equal intervals of time.
Uniformly accelerated motion is actually accelerated when the body increases the speed of movement, and slowed down when the speed decreases. To simplify problem solving, it is convenient to take acceleration with a “–” sign for slow motion.
From the previous formula follows another more common formula that describes change in speed over time with uniformly accelerated motion:
Move (but not path) with uniformly accelerated motion is calculated using the formulas:

![]()
The last formula uses one feature uniformly accelerated motion. With uniformly accelerated motion average speed can be calculated as the arithmetic mean of the initial and final speeds (this property is very convenient to use when solving some problems):
Calculating the path is getting more complicated. If the body did not change the direction of movement, then with uniformly accelerated rectilinear motion, the path is numerically equal to the displacement. And if it changed, you need to separately count the path to the stop (the moment of reversal) and the path after the stop (the moment of reversal). And simply substituting time into the formulas for moving in this case will lead to a typical error.
Coordinate with uniformly accelerated motion changes according to the law:

Projection of speed during uniformly accelerated motion it changes according to the following law:
![]()
Similar formulas are obtained for the remaining coordinate axes.
Free fall vertically
All bodies located in the gravitational field of the Earth are affected by the force of gravity. In the absence of support or suspension, this force causes bodies to fall towards the surface of the Earth. If we neglect air resistance, then the movement of bodies only under the influence of gravity is called free fall. The force of gravity imparts to any body, regardless of its shape, mass and size, the same acceleration, called the acceleration of gravity. Near the Earth's surface acceleration of gravity is:
This means that the free fall of all bodies near the Earth's surface is uniformly accelerated (but not necessarily rectilinear) motion. First, let's consider the simplest case of free fall, when the body moves strictly vertically. Such motion is uniformly accelerated rectilinear motion, therefore all the previously studied patterns and focuses of such motion are also suitable for free fall. Only the acceleration is always equal to the acceleration of gravity.
Traditionally, in free fall, the OY axis is directed vertically. There's nothing wrong with that. You just need in all formulas instead of the index " X" write " at" The meaning of this index and the rule for defining signs is preserved. Where to direct the OY axis is your choice, depending on the convenience of solving the problem. There are 2 options: up or down.
Let us present several formulas that are solutions to some specific problems in kinematics for vertical free fall. For example, the speed with which a body falling from a height will fall h without initial speed:
Time of a body falling from a height h without initial speed:

The maximum height to which a body thrown vertically upwards will rise initial speed v 0, the time it takes for this body to rise to its maximum height, and full time flight (before returning to the starting point):
Horizontal throw
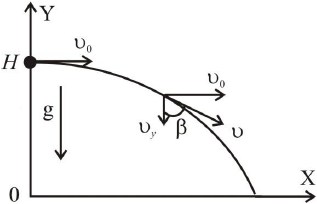
When thrown horizontally with initial speed v 0 the movement of a body is conveniently considered as two movements: uniform along the OX axis (along the OX axis there are no forces preventing or assisting the movement) and uniformly accelerated movement along the OY axis.
The speed at any moment of time is directed tangentially to the trajectory. It can be decomposed into two components: horizontal and vertical. The horizontal component always remains unchanged and is equal to v x = v 0 . And the vertical increases according to the laws of accelerated motion v y = GT. Wherein full body speed can be found using the formulas:
![]()
![]()
It is important to understand that the time a body falls to the ground in no way depends on the horizontal speed with which it was thrown, but is determined only by the height from which the body was thrown. The time a body falls to the ground is found by the formula:
While the body is falling, it simultaneously moves along the horizontal axis. Hence, body flight range or the distance that the body can fly along the OX axis will be equal to:
Angle between horizon and the speed of the body can be easily found from the relation:

Also, sometimes in problems they may ask about the moment of time at which the full speed of the body will be inclined at a certain angle to verticals. Then this angle will be found from the relationship:

It is important to understand which angle appears in the problem (vertical or horizontal). This will help you choose correct formula. If we solve this problem using the coordinate method, then general formula for the law of coordinate change during uniformly accelerated motion:
![]()
Transforms into the following law of motion along the OY axis for a body thrown horizontally:
With its help, we can find the height at which the body will be located at any given time. In this case, at the moment the body falls to the ground, the coordinate of the body along the OY axis will be equal to zero. It is obvious that the body moves uniformly along the OX axis, therefore, within the framework of the coordinate method, the horizontal coordinate will change according to the law:
Throw at an angle to the horizon (from ground to ground)
Maximum lift height when throwing at an angle to the horizontal (relative to the initial level):

Rise time to maximum height when throwing at an angle to the horizontal:

Flight range and total flight time of a body thrown at an angle to the horizon (provided that the flight ends at the same altitude from which it began, i.e. the body was thrown, for example, from ground to ground):

The minimum speed of a body thrown at an angle to the horizontal is in highest point rise, and is equal to:
The maximum speed of a body thrown at an angle to the horizontal is at the moments of the throw and fall to the ground, and is equal to the initial one. This statement is only true for ground to ground throws. If the body continues to fly below the level from which it was thrown, then it will acquire greater and greater speed there.
Speed addition
The motion of bodies can be described in various reference systems. From the point of view of kinematics, all reference systems are equal. However, the kinematic characteristics of movement, such as trajectory, displacement, speed, turn out to be different in different systems. Quantities that depend on the choice of the reference system in which they are measured are called relative. Thus, rest and movement of a body are relative.
Thus, the absolute speed of a body is equal to the vector sum of its speed relative to the moving frame of reference and the speed of the moving frame of reference itself. Or, in other words, the speed of a body in a stationary frame of reference is equal to the vector sum of the speed of the body in a moving frame of reference and the speed of the moving frame of reference relative to the stationary frame.
Uniform movement around a circle
The movement of a body in a circle is a special case of curvilinear movement. This type of motion is also considered in kinematics. In curvilinear motion, the velocity vector of the body is always directed tangentially to the trajectory. The same thing happens when moving in a circle (see figure). The uniform motion of a body in a circle is characterized by a number of quantities.

Period- the time during which a body, moving in a circle, makes one full revolution. The unit of measurement is 1 s. The period is calculated using the formula:
Frequency– the number of revolutions made by a body moving in a circle per unit time. The unit of measurement is 1 rev/s or 1 Hz. The frequency is calculated using the formula:
In both formulas: N– number of revolutions per time t. As can be seen from the above formulas, period and frequency are reciprocal quantities:
![]()
At uniform rotation speed body will be defined as follows:
![]()
Where: l– circumference or path traveled by a body in a time equal to the period T. When a body moves in a circle, it is convenient to consider the angular displacement φ (or angle of rotation), measured in radians. Angular velocity ω body at a given point is called the ratio of small angular displacement Δ φ to a short period of time Δ t. Obviously, in a time equal to the period T the body will pass an angle equal to 2 π , therefore, when uniform motion along the circumference the formulas are fulfilled:
![]()
Angular velocity is measured in rad/s. Don't forget to convert angles from degrees to radians. Arc length l is related to the rotation angle by the relation:
Communication between linear speed module v and angular velocity ω :
![]()
When a body moves in a circle with a constant absolute speed, only the direction of the velocity vector changes, therefore the movement of a body in a circle with a constant absolute speed is a motion with acceleration (but not uniformly accelerated), since the direction of the speed changes. In this case, the acceleration is directed radially towards the center of the circle. It is called normal, or centripetal acceleration, since the acceleration vector at any point of the circle is directed towards its center (see figure).

Centripetal acceleration module associated with linear v and corner ω speed ratios:
![]()
Please note that if bodies (points) are on a rotating disk, ball, rod, etc., in a word, on the same rotating object, then all bodies have the same rotation period, angular velocity and frequency.
Displacement, displacement, movement, migration, movement, rearrangement, regrouping, transfer, transportation, transition, relocation, transfer, travel; shifting, moving, telekinesis, epeirophoresis, relocation, rolling, waddle,... ... Synonym dictionary
MOVEMENT, movement, cf. (book). 1. Action under Ch. move move. Moving within the service. 2. Action and condition according to Ch. move move. Movement of layers of the earth's crust. Dictionary Ushakova. D.N. Ushakov. 1935 1940 ... Ushakov's Explanatory Dictionary
In mechanics, a vector connecting the positions of a moving point at the beginning and end of a certain period of time; The P vector is directed along the chord of the point's trajectory. Physical encyclopedic Dictionary. M.: Soviet encyclopedia. Chief Editor A.M.... ... Physical encyclopedia
MOVE, eat, eat; still (yon, ena); owls, who what. Place, transfer to another place. P. scenery. P. brigade to another site. Displaced persons (persons forcibly displaced from their country). Ozhegov's explanatory dictionary. S.I.... ... Ozhegov's Explanatory Dictionary
- (relocation) Relocation of an office, enterprise, etc. to another place. Often it is caused by a merger or acquisition. Sometimes employees receive a relocation allowance, which is intended to encourage them to stay in their current location... ... Dictionary of business terms
moving- - Telecommunications topics, basic concepts EN redeployment ... Technical Translator's Guide
Moving,- Displacement, mm, the amount of change in the position of any point of an element of a window block (usually a frame impost or vertical bars of sashes) in the direction normal to the plane of the product under the influence of wind load. Source: GOST... ...
moving- Migration of material in the form of a solution or suspension from one soil horizon to another... Dictionary of Geography
moving- 3.14 transfer (in relation to storage location): Changing the storage location of a document. Source: GOST R ISO 15489 1 2007: System of information standards... Dictionary-reference book of terms of normative and technical documentation
moving- ▲ change of position, motionless in space, change of position in space; transformation of a figure that preserves the distances between points of the figure; movement to another place. movement. forward motion... ... Ideographic Dictionary of the Russian Language
Books
- Movement of people and cargo in near-Earth space through technical ferrographitization, R. A. Sizov. This publication is the second applied edition to the books by R. A. Sizov “Matter, Antimatter and Energy Environment - Physical Triad real world", in which, based on what was discovered...
- Movement of people and cargo in near-Earth space through technical ferrogravity, R. A. Sizov. This publication is the second applied edition to the books of R. A. Sizov “Matter, Antimatter and Energy Environment - Physical Triad of the Real World”, in which, based on the discovered ...













